
ロボットコンバインの開発
—
カテゴリー:
研究(現行)
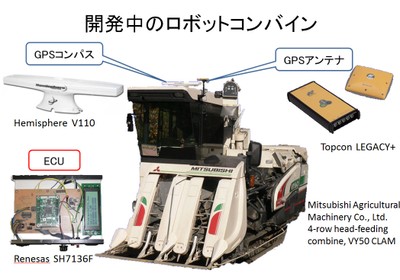
イネやコムギといった穀物を自動で収穫するロボットコンバインの開発を行っています。この研究では、Global Positioning System(GPS)やジャイロセンサを搭載して、自分の位置を検出しながら自動走行するだけでなく、収穫した穀物の積み卸し作業の自動化も目指しています。
研究目的
イネやコムギを収穫する自脱コンバインをロボット化をして、刈取作業と収穫物の積み卸し作業の自動化を目的としています。そのために、Global Positioning System (GPS)、コンパス、ジャイロセンサ等のセンサを用いて、自分の位置姿勢を正確に検出し、あらかじめ経路計画された目標経路に追従しながら、刈取作業を行います。このため、コンバインの速度制御、自動操向制御を研究しています。また、刈取作業中にタンクが一杯になれば、収穫物を積み卸す位置まで自動で移動して、排出オーガを運搬トラックの荷台へ自動で位置決めするシステムの研究も行っています。

 前: 車体屈折車両の小旋回制御
前: 車体屈折車両の小旋回制御
