
車体屈折車両の小旋回制御
—
カテゴリー:
研究(現行)
堆肥や土砂の積み込み作業に用いるホイールローダは、車体を折り曲げて操舵を行います。このような車両は、前後の車輪が同じ轍を通り小旋回に適しています。もっと小回りを実現するため、ブレーキ制御を応用する研究を行っています。
研究目的
車体屈折車両は、車体を折り曲げて旋回するため、操舵のために車輪を転舵することがありません。このため、前後の車軸が車体にしっかり固定されており、重量物の積み込みや牽引を目的としたホイールローダーや大型トラクタに採用さえています。この操舵機構は、前後の車輪が同じ轍を通るたり、旋回半径も小さくなるため、狭い畜舎での作業に適しています。さらに小旋回性能を向上できれば、作業範囲を広げることができます。しかし、車体屈折角は走行安定性と機械的な干渉による制限があります。そこで、ブレーキにより内輪と外輪の駆動力配分を制御することで、旋回半径を小さくする研究を行っています。現在は、実機による旋回挙動の計測と数値モデルによるシミュレーション結果の比較を行い、小旋回制御の可能性を検討しています。また、内輪のブレーキを制御するシステムの開発も行っています。

図1 ホイールローダによる実機旋回試験
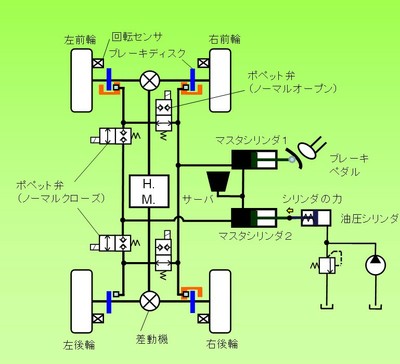
図2 ブレーキ圧制御システム
 前: リモートセンシングによる作物の状態把握
前: リモートセンシングによる作物の状態把握

